昆虫大小的飞行机器人可以帮助完成耗时的任务,例如调查大型农场的作物生长或嗅出气体泄漏。这些机器人通过颤动的小翅膀翱翔,因为它们太小而无法使用螺旋桨,就像在较大的无人机表兄弟上看到的那样。小尺寸是有利的:这些机器人制造成本低,并且很容易滑入大型无人机无法触及的狭窄位置。
但目前飞行的机器人仍然拴在地上。他们需要为电动和控制机翼所需的电子设备太重,无法携带这些微型机器人。
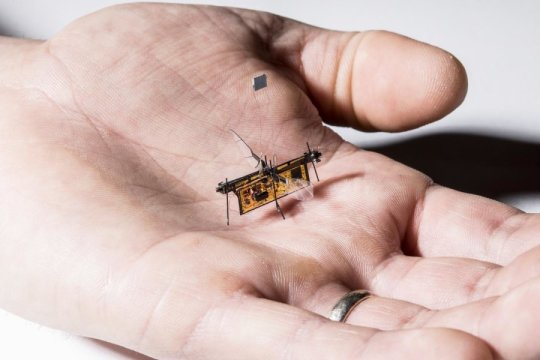
现在,华盛顿大学的工程师们第一次切断了电源线并增加了一个大脑,允许他们的RoboFly采用它的第一个独立襟翼。对于机器人来说,这可能是一个小襟翼,但它是机器人类的一个巨大飞跃。该团队将于5月23日在澳大利亚布里斯班举行的国际机器人与自动化大会上发表研究结果。
RoboFly比牙签略重,并由激光束提供动力。它使用一个微小的板载电路,将激光能量转换成足够的电力来操作它的机翼。
“在此之前,无线昆虫大小的飞行机器人的概念是科幻小说。我们是否能够在不需要电线的情况下使它们工作?” 合着者,美国威斯康星大学机械工程系助理教授Sawyer Fuller说。“我们的新无线RoboFly显示它们更接近现实生活。”
工程挑战是拍打。机翼摆动是一个耗电的过程,导向机翼的动力源和控制器都太大而且体积庞大,无法乘坐小型机器人。所以富勒以前的机器人RoboBee有一条皮带 - 它通过地面的电线接收电力和控制。
但是飞行机器人应该能够独立运作。富勒和团队决定使用狭窄的隐形激光束为他们的机器人提供动力。他们将激光束指向光伏电池,光伏电池连接在RoboFly上方并将激光转换为电能。
“这是向RoboFly快速传递大量权力而不增加太多重量的最有效方式,”合着者Shyam Gollakota表示,他是美国威斯康星大学Paul G. Allen计算机科学与工程学院的副教授。
但是,仅激光器不能提供足够的电压来移动机翼。这就是为什么该团队设计了一个电路,将从光伏电池出来的七伏电压提升到飞行所需的240伏特。
为了让RoboFly控制自己的翅膀,工程师提供了一个大脑:他们在同一个电路中增加了一个微控制器。
华盛顿大学电气工程系的博士生Vikram Iyer说:“微控制器的作用就像真正的苍蝇大脑一样,可以让你的肌肉在何时发射。” “在RoboFly上,它会告诉翅膀'现在很难拍打'或'不要拍打'。”
具体来说,控制器以波浪形式发送电压,以模仿真实昆虫翅膀的颤动。
“它使用脉冲来塑造波浪,”主要作者,机械工程博士生约翰内斯詹姆斯说。“为了使机翼迅速向前倾斜,它会快速连续发出一系列脉冲,然后当你靠近波浪顶部时减慢脉冲速度。然后它反过来使翼部在另一个中平稳地翻动方向。”
目前,RoboFly只能起飞和降落。一旦其光伏电池离开激光器的直接视线,机器人就会耗尽电力并着陆。但该团队希望很快能够引导激光,以便RoboFly可以盘旋并飞来飞去。
虽然RoboFly目前由激光束供电,但未来版本可以使用微型电池或从射频信号中获取能量,Gollakota说。这样,可以针对特定任务修改其电源。
富勒说,未来的RoboFlies还可以期待更先进的大脑和传感器系统,帮助机器人自行导航和完成任务。
“我真的很想找到一个发现甲烷泄漏的人,”他说。“你可以买一个装满它们的行李箱,把它打开,然后它们就会在你的建筑物周围飞来飞去寻找漏出管道的气体。如果这些机器人可以很容易地发现泄漏,那么它们就更有可能修补,这将减少温室气体排放。这是受到真正的苍蝇的启发,真正的苍蝇真的善于飞来寻找臭味的东西。所以我们认为这是我们的RoboFly的一个很好的应用。
猜你喜欢
最新文章










- 惠普今日发布了该公司的2022财年第三财季财报

2022-08-31 15:13:25
- MyFitnessPal将其流行的条形码扫描仪功能放在付费墙后面

2022-08-31 09:50:57
- 摩托罗拉系统收购无线电专家巴雷特

2022-08-30 14:12:44
- 安全hold公布2022年第二季度业绩

2022-08-29 14:47:40
- Wheels Up宣布创纪录的第二季度收入同比增长49%

2022-08-29 14:11:27