导读 它是一种机器人狗,可以走路,小跑,跳舞,跳跃,跳跃和后空翻,你可以在家里以低于2,600美元的价格建造它。还有一个名为Stanford Woofer
它是一种机器人狗,可以走路,小跑,跳舞,跳跃,跳跃和后空翻,你可以在家里以低于2,600美元的价格建造它。还有一个名为Stanford Woofer的更大版本。
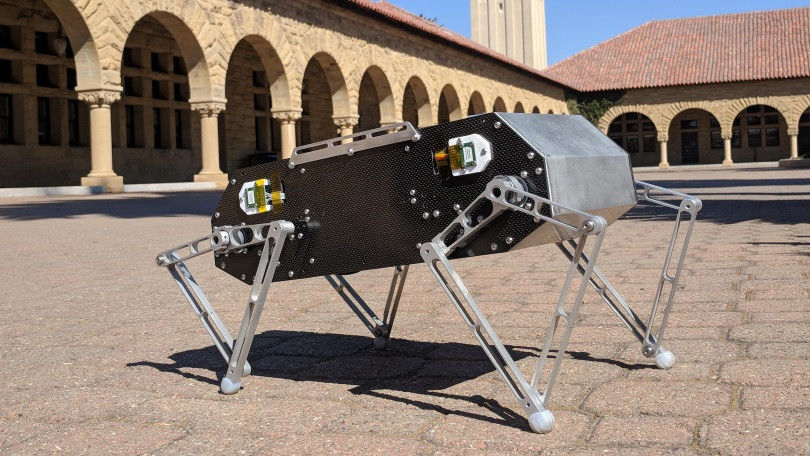
机器人将在家庭中变得越来越有用,但它们是执行设定任务的预建单元。如果您可以购买零件并构建自己的机器人伴侣怎么办?斯坦福大学的学生已经创造了这个并称之为Doggo。
Stanford Doggo由斯坦福学生机器人俱乐部的极限流动团队开发。它是一个重量不到5千克的四足机器人,能够动态运动,使其能够达到所有四足机器人的最高跳跃,达到1.07米。它还能够以0.9米/秒的速度向前移动,其灵活的移动性使机器人能够行走,小跑,跳舞,跳跃,跳跃和后空翻。
这样一个灵活的小机器人听起来很昂贵,但学生们设计Doggo时考虑了成本和可维护性。他们使用现成的组件从头开始构建它,并决定在MIT许可下共享GitHub上的所有内容,允许任何人在家中构建自己的Doggo。至于费用,学生说它应该低于2,600美元。
希望Doggo可以作为进一步发展的平台,以适应特定的角色,但这种发展在斯坦福之外发生。
研究生和极端流动性团队导师帕特里克·斯莱德解释说:“我们希望提供一个任何人都可以建立的基线系统......比如说,你想要搜索和救援;你可以用传感器装备它并在我们的顶部编写代码,让它爬上岩石堆或通过洞穴挖掘。或者它可能是用手臂或携带包裹拾取东西。“
Doggo开发团队已经开始进行其他项目,包括第二个名为Stanford Woofer的机器人,它的体积是Doggo的两倍,可以承载6kg的负载。
免责声明:本文由用户上传,如有侵权请联系删除!
猜你喜欢
最新文章










- 惠普今日发布了该公司的2022财年第三财季财报

2022-08-31 15:13:25
- MyFitnessPal将其流行的条形码扫描仪功能放在付费墙后面

2022-08-31 09:50:57
- 摩托罗拉系统收购无线电专家巴雷特

2022-08-30 14:12:44
- 安全hold公布2022年第二季度业绩

2022-08-29 14:47:40
- Wheels Up宣布创纪录的第二季度收入同比增长49%

2022-08-29 14:11:27